Zephyr AXI IIC Driver Implementation
This page provides details on the implementation of the AXI IIC Zephyr driver.
Zephyr - AXI IIC Driver - File
Zephyr - AXI IIC Device Tree
axi-i2c Node
axi_i2c0: i2c@a0000000 { compatible = "xlnx,xps-iic-2.00.a"; #address-cells = <1>; #size-cells = <0>; status = "okay"; interrupts = <GIC_SPI 89 IRQ_TYPE_LEVEL IRQ_DEFAULT_PRIORITY>; reg = <0xa0000000 0x1000>; interrupt-parent = <&gic>; };
xlnx,xps-iic-2.00.a.yaml
description: Xilinx AXI IIC Bus Interface compatible: "xlnx,xps-iic-2.00.a" include: [i2c-controller.yaml] properties: reg: required: true interrupts: required: true
Changes with respect to Linux device tree
clocks property is not added
Zephyr - AXI IIC Kconfig
Kconfig.xilinx_axi
config I2C_XILINX_AXI bool "Xilinx AXI I2C driver" default y depends on DT_HAS_XLNX_XPS_IIC_2_00_A_ENABLED || DT_HAS_XLNX_XPS_IIC_2_1_ENABLED select EVENTS help Enable the Xilinx AXI IIC Bus Interface driver. This is an FPGA logic core as described by Xilinx document PG090.
Zephyr - I2C Driver - Common Framework Hooks
i2c.h
/* Driver APIs supported by Zephyr I2C Framework */ __subsystem struct i2c_driver_api { /* configuring the I2C bus settings */ i2c_api_configure_t configure; /* get the current I2C bus configuration */ i2c_api_get_config_t get_config; /* transferring data over the I2C bus */ i2c_api_full_io_t transfer; /* registering a target device */ i2c_api_target_register_t target_register; /* unregistering a target device */ i2c_api_target_unregister_t target_unregister; /* callback for I2C transfer completion */ i2c_api_transfer_cb_t transfer_cb; /* I/O device submission in real-time I/O */ i2c_api_iodev_submit iodev_submit; /* Recover I2C bus from error state */ i2c_api_recover_bus_t recover_bus; };
Zephyr - AXI I2C Driver - Supported APIs
Driver - API
/* AXI I2C Driver - Supported Driver APIs */ static const struct i2c_driver_api i2c_xilinx_axi_driver_api = { /* initialize the I2C controller */ .configure = i2c_xilinx_axi_configure, /* Data transfers on the I2C bus */ .transfer = i2c_xilinx_axi_transfer, #if defined(CONFIG_I2C_TARGET) /* registers the device as an I2C target */ .target_register = i2c_xilinx_axi_target_register, /* removes the device as an I2C target */ .target_unregister = i2c_xilinx_axi_target_unregister, #endif };
Zephyr - AXI I2C Driver - Data Structures
Driver - Structures
/* * Structure to hold configuration data for the Xilinx AXI I2C device. */ struct i2c_xilinx_axi_config { /* Memory-mapped base address of the AXI I2C device */ mem_addr_t base; /* set up interrupt handling for the I2C device */ void (*irq_config_func)(const struct device *dev); /* flag indicating dynamic read functionality */ bool dyn_read_working; }; /* * Structure to store runtime data for the Xilinx AXI I2C device. * This includes synchronization primitives and, if enabled, target-specific settings. */ struct i2c_xilinx_axi_data { /* signal the completion of interrupt-driven operations */ struct k_event irq_event; /* synchronize access between the interrupt service routine (ISR) */ struct k_spinlock lock; /* mutual exclusion for concurrent I2C requests */ struct k_mutex mutex; #if defined(CONFIG_I2C_TARGET) /* set up I2C target-specific settings. */ struct i2c_target_config *target_cfg; /* flag indicating whether the device is currently in target reading mode. */ bool target_reading; /* flag indicating whether the current read operation has been aborted. */ bool target_read_aborted; /* flag indicating whether the device is currently in target writing mode. */ bool target_writing; #endif };
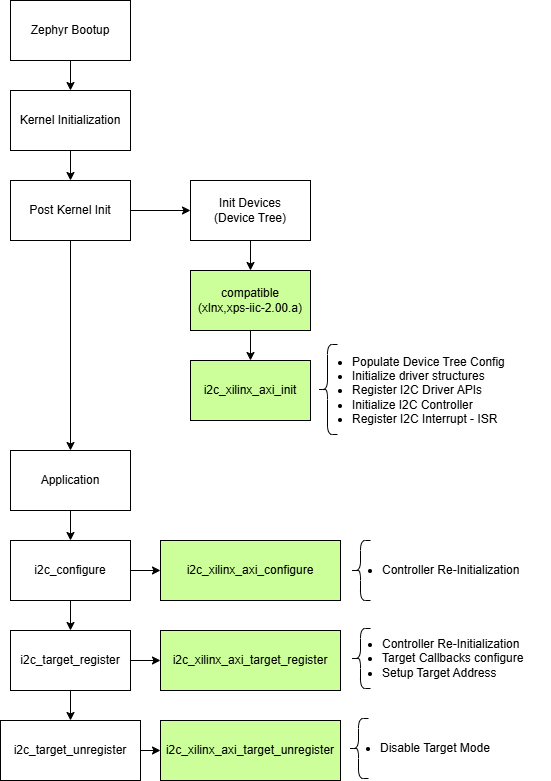
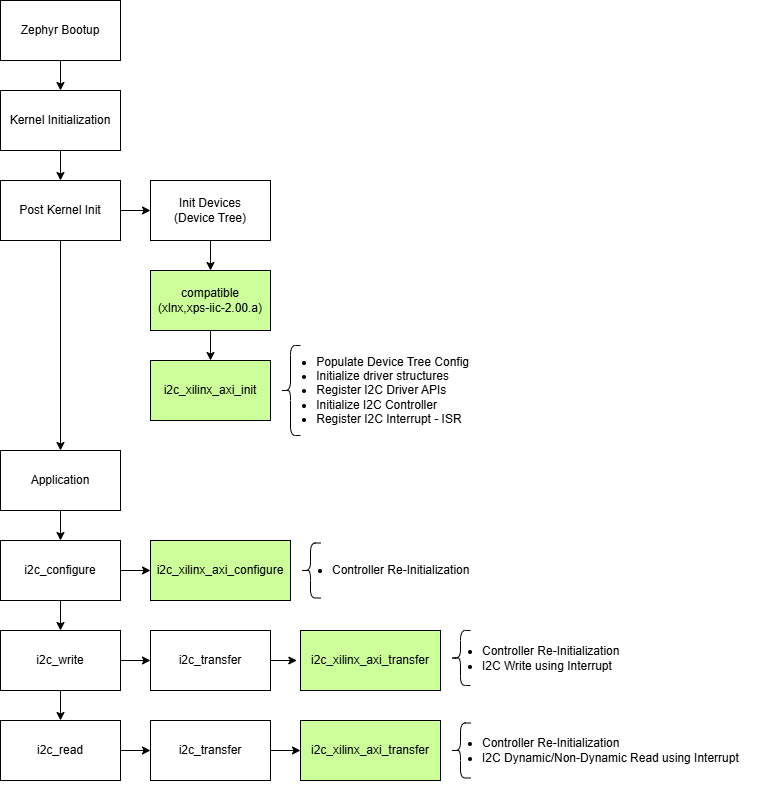
Zephyr - AXI I2C Driver - Master Mode Example Flow
Zephyr - AXI I2C Driver - Slave Mode Example Flow