Zephyr PS GPIO Driver Support
This page gives an overview of the PS GPIO Zephyr driver which is available as part of the zephyr-amd repo.
HW Features
PS/PMC GPIO Controller
Design Notes
To run testcase(tests/drivers/gpio/gpio_basic_api/) we need specific loopback design as shown in the following figure,
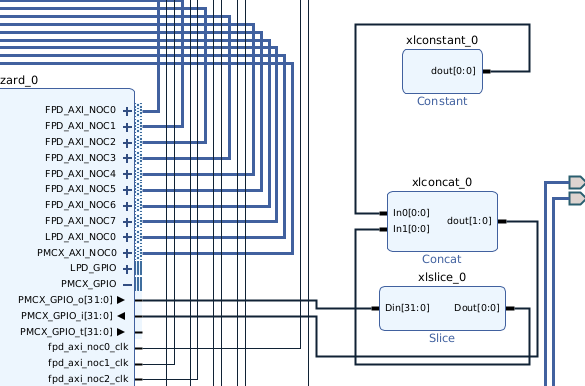
PS GPIO loopback wiring required by the gpio_basic_api test.
Implementation
Features Supported
Input/output interrupt support.
separate call back configuration for each pin.
support both level and edge trigger interrupt.
Missing Features
Does not support
get_pin_configure.Does not support
port_get_direction.
Known Issues
N/A
Limitations
Provide the bank number along with the pin number.
Kernel Configuration
CONFIG_GPIO=y
CONFIG_GPIO_XLNX_PS=y
CONFIG_GPIO_GET_DIRECTION=y
CONFIG_GPIO_GET_CONFIG=y
CONFIG_GPIO_ENABLE_DISABLE_INTERRUPT=y
Device Tree
PS GPIO Node
psgpio: gpio@f19d0000 {
compatible = "xlnx,ps-gpio";
status = "disabled";
reg = <0xf19d0000 0x1000>;
interrupts = <GIC_SPI 20 IRQ_TYPE_LEVEL
IRQ_DEFAULT_PRIORITY>;
interrupt-names = "irq_0";
#address-cells = <1>;
#size-cells = <0>;
psgpio_bank0: psgpio_bank@0 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x0>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <26>;
status = "okay";
};
psgpio_bank3: psgpio_bank@3 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x3>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <32>;
status = "okay";
};
};
PMC GPIO Node
psgpio: gpio@f1020000 {
compatible = "xlnx,ps-gpio";
status = "disabled";
reg = <0xf1020000 0x1000>;
interrupts = <GIC_SPI 180 IRQ_TYPE_LEVEL
IRQ_DEFAULT_PRIORITY>;
interrupt-names = "irq_0";
#address-cells = <1>;
#size-cells = <0>;
psgpio_bank0: psgpio_bank@0 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x0>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <26>;
status = "okay";
};
psgpio_bank1: psgpio_bank@1 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x1>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <26>;
status = "okay";
};
psgpio_bank3: psgpio_bank@3 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x3>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <32>;
status = "okay";
};
psgpio_bank4: psgpio_bank@4 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x4>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <32>;
status = "okay";
};
};
ZYNQMP GPIO Node
psgpio: gpio@ff0a0000 {
compatible = "xlnx,ps-gpio";
status = "disabled";
reg = <0xff0a0000 0x1000>;
interrupts = <GIC_SPI 16 IRQ_TYPE_LEVEL
IRQ_DEFAULT_PRIORITY>;
interrupt-names = "irq_0";
#address-cells = <1>;
#size-cells = <0>;
psgpio_bank0: psgpio_bank@0 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x0>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <26>;
status = "okay";
};
psgpio_bank1: psgpio_bank@1 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x1>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <26>;
status = "okay";
};
psgpio_bank2: psgpio_bank@2 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x2>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <26>;
status = "okay";
};
psgpio_bank3: psgpio_bank@3 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x3>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <32>;
status = "okay";
};
psgpio_bank4: psgpio_bank@4 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x4>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <32>;
status = "okay";
};
psgpio_bank5: psgpio_bank@5 {
compatible = "xlnx,ps-gpio-bank";
reg = <0x5>;
gpio-controller;
#gpio-cells = <2>;
ngpios = <32>;
status = "okay";
};
};
Bank node must be a child node of PS/PMC nodes.
Driver Stack Size
3.5 KB
txt - 2.3 KB, data - 1.2 KB
Test Platform
ZynqMP
Test SoC Architecture
RPU - R5 Core
Testing Sequence
Build zephyr application for R5 core
west build -p -b <board> <sample application path>
Run zephyr elf on board
Example Tests
Test Name |
Example Source |
Description |
|---|---|---|
PS GPIO API |
tests/drivers/gpio/gpio_basic_api/ |
Functionality check and performs interrupt-based test in loopback configuration |
Expected Output
west build -p -b kv260_r5 zephyr/tests/drivers/gpio/gpio_basic_api/ -DDTC_OVERLAY_FILE=boards/kv260_r5.overlay
Note: To run this test without any error needs specific design configuration and node label must be fixed as psgpio/psgpio_bank<x>
kv260 R5 PS GPIO test log
*** Booting Zephyr OS build xilinx_v2024.2-9-g8f81c04d5091 ***
Running TESTSUITE after_flash_gpio_config_trigger
===================================================================
START - test_gpio_config_trigger
Open drain not supported.
SKIP - test_gpio_config_trigger in 0.047 seconds
===================================================================
START - test_gpio_config_twice_trigger
Open drain not supported.
SKIP - test_gpio_config_twice_trigger in 0.047 seconds
===================================================================
TESTSUITE after_flash_gpio_config_trigger succeeded
Running TESTSUITE gpio_port
===================================================================
START - test_gpio_port
Validate device psgpio_bank@3
Check psgpio_bank@3 output 0 connected to input 1
OUT 0 to IN 1 linkage works
bits_physical
pin_physical
check_raw_output_levels
check_logic_output_levels
check_input_levels
bits_logical
check_pulls
pull-up not supported
PASS - test_gpio_port in 0.478 seconds
===================================================================
TESTSUITE gpio_port succeeded
Running TESTSUITE gpio_port_cb_mgmt
===================================================================
START - test_gpio_callback_add_remove
callback_2 triggered: 1
callback_1 triggered: 1
callback_2 triggered: 1
PASS - test_gpio_callback_add_remove in 3.738 seconds
===================================================================
START - test_gpio_callback_enable_disable
callback_2 triggered: 1
callback_1 triggered: 1
callback_2 triggered: 1
callback_1 triggered: 1
PASS - test_gpio_callback_enable_disable in 3.781 seconds
===================================================================
START - test_gpio_callback_self_remove
callback_remove_self triggered: 1
callback_1 triggered: 1
callback_1 triggered: 1
PASS - test_gpio_callback_self_remove in 2.653 seconds
===================================================================
TESTSUITE gpio_port_cb_mgmt succeeded
Running TESTSUITE gpio_port_cb_vari
===================================================================
START - test_gpio_callback_variants
callback triggered: 1
OUT init a0001, IN cfg 3400000, cnt 1
callback triggered: 1
OUT init 60000, IN cfg 5400000, cnt 1
callback triggered: 1
OUT init 60000, IN cfg 5c00000, cnt 1
callback triggered: 1
OUT init a0001, IN cfg 3c00000, cnt 1
callback triggered: 1
callback triggered: 2
callback triggered: 3
OUT init 60000, IN cfg 4400000, cnt 3
callback triggered: 1
callback triggered: 2
callback triggered: 3
OUT init a0001, IN cfg 2400000, cnt 3
callback triggered: 1
callback triggered: 2
callback triggered: 3
OUT init 60000, IN cfg 4c00000, cnt 3
callback triggered: 1
callback triggered: 2
callback triggered: 3
OUT init a0001, IN cfg 2c00000, cnt 3
callback triggered: 1
callback triggered: 2
OUT init a0001, IN cfg 7400000, cnt 2
PASS - test_gpio_callback_variants in 11.219 seconds
===================================================================
TESTSUITE gpio_port_cb_vari succeeded
------ TESTSUITE SUMMARY START ------
SUITE SKIP - 0.00% [after_flash_gpio_config_trigger]: pass = 0, fail = 0, skip = 2, total = 2 duration = 0.094 seconds
SKIP - [after_flash_gpio_config_trigger.test_gpio_config_trigger] duration = 0.047 seconds
SKIP - [after_flash_gpio_config_trigger.test_gpio_config_twice_trigger] duration = 0.047 seconds
SUITE PASS - 100.00% [gpio_port]: pass = 1, fail = 0, skip = 0, total = 1 duration = 0.478 seconds
PASS - [gpio_port.test_gpio_port] duration = 0.478 seconds
SUITE PASS - 100.00% [gpio_port_cb_mgmt]: pass = 3, fail = 0, skip = 0, total = 3 duration = 10.172 seconds
PASS - [gpio_port_cb_mgmt.test_gpio_callback_add_remove] duration = 3.738 seconds
PASS - [gpio_port_cb_mgmt.test_gpio_callback_enable_disable] duration = 3.781 seconds
PASS - [gpio_port_cb_mgmt.test_gpio_callback_self_remove] duration = 2.653 seconds
SUITE PASS - 100.00% [gpio_port_cb_vari]: pass = 1, fail = 0, skip = 0, total = 1 duration = 11.219 seconds
PASS - [gpio_port_cb_vari.test_gpio_callback_variants] duration = 11.219 seconds
------ TESTSUITE SUMMARY END ------
===================================================================
PROJECT EXECUTION SUCCESSFUL
Performance Metric
TBA
Mainline Status
Mainlined
Driver Source Path
drivers/gpio/gpio_xlnx_ps_bank.c
Misra C Report
Per coding guidelines of zephyr
Misra-c |
driver file |
kernel utility |
Actual violation |
|---|---|---|---|
4.6 |
11 |
0 |
11 |
4.8 |
7 |
5 |
2 |
1.2 |
16 |
16 |
0 |
10.1 |
10 |
0 |
10 |
10.3 |
2 |
0 |
2 |
10.4 |
68 |
0 |
68 |
10.5 |
14 |
0 |
14 |
12.1 |
1 |
1 |
0 |
12.2 |
3 |
3 |
0 |
14.4 |
5 |
0 |
5 |
15.5 |
5 |
0 |
5 |
15.7 |
2 |
0 |
2 |
20.10 |
6 |
6 |
0 |
21.1 |
2 |
0 |
2 |
21.2 |
35 |
33 |
2 |
5.9 |
3 |
3 |
0 |
8.4 |
2 |
2 |
0 |
8.6 |
2 |
2 |
0 |
8.7 |
4 |
4 |
0 |
Total |
198 |
75 |
123 |